Introduction
This page describes some tools developed by our team
MODCS - Modelling of Distributed and Concurrent Systems -Āin the context of hard
real-time systems with energy constraints. More specifically, these tools
have been developed for supporting the activities related to the software synthesis methodology described in theĀnext section.
Methodology
Figure 1 depicts an overview of the proposed
design methodology for implementing embedded
software synthesis. This work assumes the tasksÆ
code was defined beforehand in order to provide a behavioral
description in the system specification.
Initially, the designer defines the system specification,
which consists of a set of concurrent tasks with their respective
constraints, behavioral descriptions, information
related to the hardware platform (e.g. voltage/frequency
levels and energy consumption) as well as the system energy
constraint. A measurement activity may be required
whether the designer does not possess the tasksÆ timing information
or the information regarding the hardware energy
consumption. Next, the specification is translated into an
internal model able to represent concurrent activities, timing
information, inter-task relations, such as precedence
and mutual exclusion, as well as energy constraints. The
adopted internal model is a time Petri net extension, labeled
with energy consumption values. After generating the internal
model (TPN), the designer may firstly choose to perform
property analysis/verification or carry out the scheduling activity.
This work adopts a pre-runtime scheduling method
in order to find out a feasible schedule that satisfies timing,
inter-task and energy constraints. Next, the feasible schedule
is adopted as input to the automatic code generation
mechanism, such that a tailored code is obtained with the
respective runtime control, namely, dispatcher. Finally, the
application is validated on a DVS platform in order to check
system behaviour as well as the respective constraints. Once
the system is validated, it can be deployed to the real environment.
Figure 1
AMALGHMA Tool
AMALGHMA tool (Figure 2) - Advanced Measurement Algorithms for Hardware Architectures - has been adopted for automating the measuring activities.
Firstly, the hardware characterization is performed, in such a way that the mean value of the energy consumption per clock cycle is obtained for each CPU voltage/frequency level.
In this work, these values have been obtained by implementing a C function using the set of instructions common in the software application as well as the number of times that each instruction occurs.
The measurement scheme is presented in Figure 3. In order to estimate power consumption, a PC running AMALGHMA is connected to an Agilent DSO03202A oscilloscope, which captures the CPU current draw by measuring the voltage drop across a 1 Ohm sense resistor. In this paper, the target platform is based on [1], which adopts a Philips LPC2106 processor, an 32-bit microcontroller with ARM7 core. Next, the worst-case execution cycles (WCEC) of each task and dispatcher (runtime support) are acquired. In this case, the oscilloscope is connected to an I/O port of the target CPU, which indicates tasks' start and end times. It is important to state that the code of each task has been adjusted to force the respective worst-case execution cycles during the measurement process.
Additionally, AMALGHMA adopts a set of statistical methods, such as bootstrap[2] and parametric methods[3], which
are important in the measurement process due to several factors, for instance: (i) oscilloscope resolution; and (ii) resistor error. Besides, AMALGHMA has been validated considering LPC2106 datasheet as well as ARM7TDMI reference manual
. For instance, considering the power consumption of LPC2106 core, the datasheet informs 0.054W, whereas AMALGHMA measured 0.059W, a difference of 5mW. Besides, a task was implemented considering 10000 clock cycles. AMALGHMA measured 10050 cycles during task execution, a difference of 50 cycles.
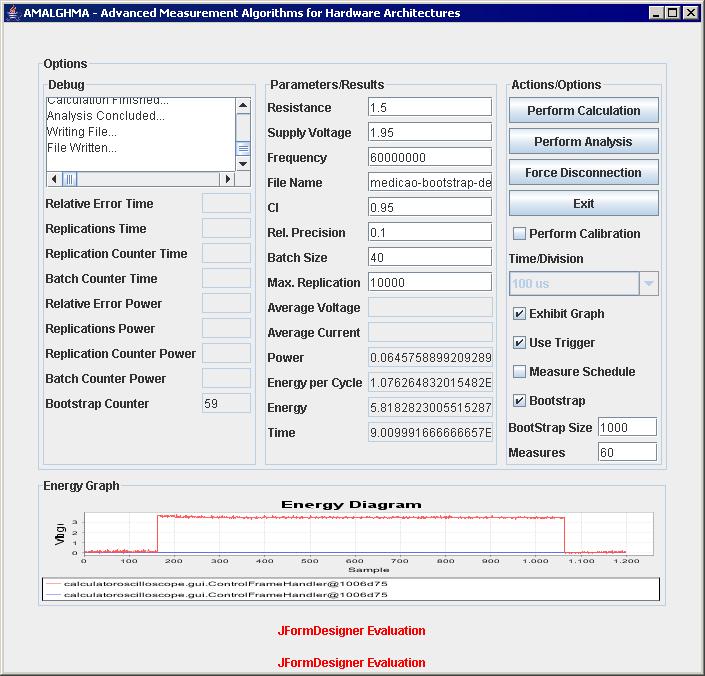
Figure 2
Figure 3
DENTES Tool
DENTES
tool - Development ENvironment for Time-Critical Embedded Systems -Ā has
been constructed for automating the modeling and scheduling phases of the
proposed methodology. From a system specification, the
respective time Petri net model is automatically generated, and the pre-runtime scheduling is performed, hiding the details for
non-specialized users. Figure 4 depicts a screenshot of DENTES tool.
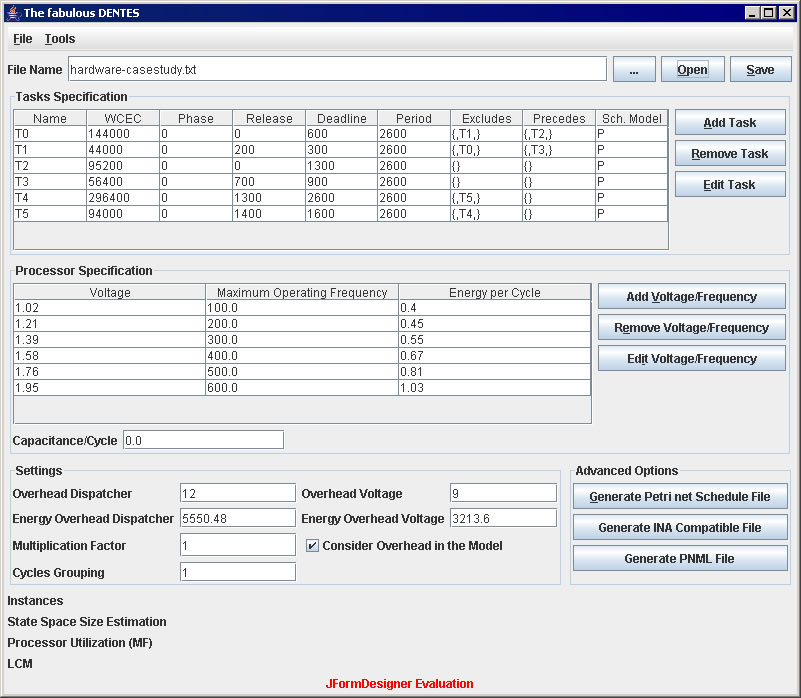
Figure 3
Manual
Currently, the manual is available only in
portuguese. Click here for a copy.
Download
If you want a copy of DENTES or AMALGHMA
tool, please, enter in contact with Prof Paulo Maciel through prmm at cin dot
ufpe dot br
Bibliography
[1] Phatrapornnant, T., Pont, M., 2006.
Reducing Jitter in Embedded Systems Employing a Time-Triggered Software Architecture and Dynamic Voltage Scaling.
IEEE Trans. on Comp., 55(2):113--24.
[2] B. Efron, R.
Tibshirani, An Introduction to the Bootstrap, Chapman and Hall,
1993
[3]ĀChung,ĀC., Simulation Modeling Handbook - A
Practical Approach CRC PRESS,Ā 2004.